
동문오피니언
[IP노믹스]차원용(77회)/생물로봇(Bio-robot) 시대가 오고 있다(퍼온글)
본문
퍼온곳 : 전자신문 etnews(17. 3.11)
생물로봇(Bio-robot) 시대가 오고 있다
- DNA 신호에 따라 단백질 모터로 세포 모양 바꾸는 분자로봇 개발
일본 도호쿠대학(Tohoku University) 공대의 로봇학과와 호쿠리쿠 첨단과학기술대학원대학(JAIST)의 물질과학과의 과학자들이 DNA의 신호에 따라 단백질 모터로 형태(모양)를 바꾸는(shape-changing) 세포크기와 비슷한 20,000나노(20μ)의 분자로봇을 개발했다.
향후 이를 더욱 정밀하게 개발한다면, 세균이나 바이러스를 잡는 백혈구 로봇, 조직이나 세포 안에서 센서/프로세서/구동체 등의 역할을 하는 분자로봇, 화학이나 인조생물학에서 사용할 차세대 다양한 분자기계 등을 만들 수 있는 획기적인 발판을 마련해, <DNA의 신호에 따라 단백질 모터로 형태(모양)를 바꾸는 마이크로 크기의 분자로봇(Micrometer-sized molecular robot changes its shape in response to signal molecules)>이라는 논문을 발표했다(Sato et al., Science Robotics, 1 Mar 2017; Science Daily, 2 Mar 2017).
이것은 분자로봇시스템(a molecular robotic system)이 DNA의 신호를 인식하고 형태 변화 기능(shape-changing function)을 제어 할 수 있는 최초의 사례다. 이것이 의미하는 것은 분자 로봇들이 가까운 장래에 조직이나 세포 등 살아있는 유기체들(living organisms)과 유사한 방식으로 상호작용 할 수 있다는 것이다.
DNA와 단백질과 같은 정교한 생체분자들(biomolecules)을 사용하면, 살아있는 유기체들은 중요한 기능을 수행할 수 있다. 예를 들어, 백혈구들(blood cells)은 화학 신호를 감지하고 표적으로 이동해 박테리아를 추적할 수 있다. 화학 및 합성(인조)생물학 분야에서는 센서, 프로세서 및 액추에이터(구동체)와 같은 다양한 분자기계들을 만들기 위한 요소기술들이 생체 분자들을 사용해 만들어진다. 분자로봇은 분자기계들을 통합해 만들어진 하나의 인공 분자 시스템(is an artificial molecular system)이다.
연구진은 이러한 시스템의 실현이 분자 기반 위에 설계된 하나의 바이오-영감적인 로봇처럼 획기적인 발전을 가져올 수 있다고 믿는다.
연구 그룹에 의해 개발된 분자로봇은 인간 세포의 크기와 비슷한 십만 분의 1m에 달하는 매우 작은 크기이다. 분자로봇은 단백질로 구성된 분자 액추에이터(모터)와 DNA로 구성된 분자 클러치(molecular clutch)로 구성된다. 로봇의 몸체(인공 세포막)의 모양은 액추에이터에 의해 변경 될 수 있으며, 액츄에이터에 의해 발생된 힘의 전달은 분자 클러치에 의해 제어 될 수 있다. 연구팀은 실험을 통해 분자로봇이 특정 DNA 신호에 반응하여 모양(형태) 변화 행동(shape-changing behavior)을 시작하고 중지 할 수 있음을 보여주었다.
이 연구를 이끌었던 도호쿠대학의 노무라 신이치로(Shin-ichiiro Nomura) 부교수는 "농도가 다른 20 가지 이상의 화학 물질들로 분자로봇 작업에 적합한 조건들을 수립하는 데 1 년 반이 걸렸다. 현미경을 통해 로봇의 모양을 바꾸는 움직임을 보는 것은 흥미로웠다. 이것은 로봇 내부의 복잡한 조건에도 불구하고 설계된 DNA 클러치가 완벽하게 작동하고 있다는 것을 의미한다"고 말했다.
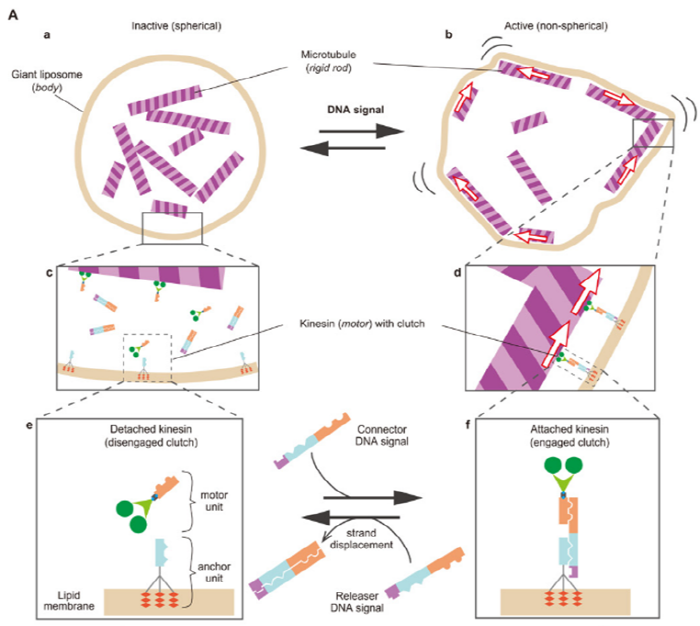
▲ 하나의 세포 전체가 분자로봇임. 리포좀(리포솜, liposome)은 인공 세포막(artificial cell membrane)으로 몸체(body)이고, 이 안에 여러 분자기계들을 융합한 것임. 미세소관(microtubule)은 세포질에서 전자 현미경으로 관찰되는 미세한 관 모양의 구조를 모방하여 만든 것으로 여기서는 길다란 고체 막대(rigid rod)로 DNA신호를 받아 움직이게 됨. 이때 DNA신호란 이완(releaser)과 연결(connector)을 말함. 키네신(kinesin)은 운동 단백질(motor protein)로, DNA가 연결신호를 주면, 오른쪽과 같이 키네신이 연결되고(클러치 기능), 키네신의 운동 유니트(motor unit)의 힘(force)에 의해 화살표 방향으로 움직여 형태(모양)를 바꾸게 됨. 따라서 오른쪽은 DNA신호를 받아 활성화된 비-구형이고, 왼쪽은 이완 신호에 따라 클러치 기능이 해제된 비활성화 상태의 구형임. Credit: Yusuke Sato
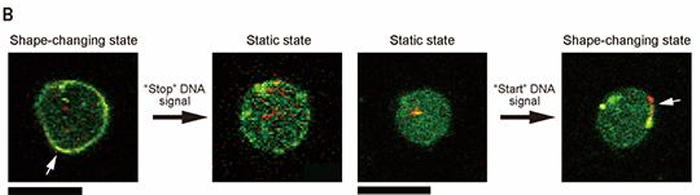
▲ 분자로봇의 현미경 이미지. DNA 신호가 “Stop”하라 하면 클러치는 “Off”되어 형태변화행동(shape-changing behavior)이 멈추는 비활성 상태의 구형이 되고, “Start”의 신호가 주어지면 클러치가 “On”되어 형태가 변화된 비-구형이 됨. 화살표는 운동 단백질(motor protein)인 키네신(kinesin)에 의한 변형을 나타냄. Scale bar: 20마이크로(20,000나노). Credit: Yusuke Sato
분자 수준에서 구성 요소들을 설계하고, 인체와 같이 작고 복잡한 환경에서 기능을 할 수 있는 분자 로봇의 실현은 로봇 공학의 가능성을 크게 확대 할 것으로 기대된다. 이 연구의 결과는 살아있는 배양 세포들을 위한 치료 로봇 및 환경 오염 검사를 위한 모니터링 로봇과 같은 중요한 의료 문제를 해결하는 데 도움이 될 수 있는 기술 개발로 이어질 수 있을 것으로 기대하고 있다.
역시 융합이 대세이다. 전자와 생물이 만나는 생물전자(Bio-electronic)에 이어 이제는 로봇과 생물이 만나는 생물로봇(Bio-robot) 시대가 오고 있다. 그리고 그 연결고리는 역시 나노기술이다. 왜 우리는 이러한 융합연구를 하지 못할까? [정리 김들풀 기자 itnews@itnews.or.kr]

차원용 소장/교수/MBA/공학박사/미래학자
아스팩미래기술경영연구소(주) 대표, 국가과학기술심의회 ICT융합전문위원회 전문위원, 국토교통부 자율주행차 융복합미래포럼 비즈니스분과 위원, 전자정부 민관협력포럼 위원, 국제미래학회 과학기술위원장
2017년 3월 11일









댓글목록 0